株式会社コンセプトは、株式会社デンソーが開発中の、道路の橋などの社会インフラの点検に使用する産業用 UAV (ドローン)向けに画像認識技術を用いた飛行速度制御の実装を進めています。
Qonceptはこれまで、大阪大学発の研究開発型技術ベンチャー企業として、「Qoncept 4D Tracker」「Qoncept Visual SLAM」「Qoncept AR Engine」などの独自の画像認識技術を開発し、放送やスポーツの現場で実用可能な技術として継続的発展を遂げております。特に、スポーツ分野では、リアルタイムで使用可能な計測技術として、国際大会等の大舞台で活用されています。また、ドローンの分野でも、画像処理によるドローンの自動制御技術の研究開発を実施しており、東京都の助成金事業「次世代イノベーション創出プロジェクト2020助成事業」にも採択されております。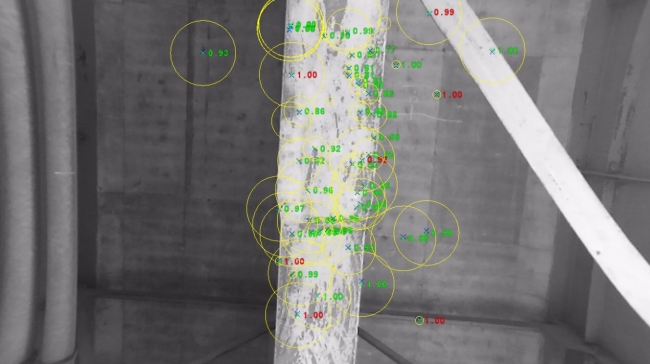
産業用UAV(ドローン)を活用したインフラ点検において、損傷点検用に撮影する画像の質及び量を必要十分なものとするための方策としては、機体の進行速度を一定に保つという方法があります。一般的に、屋外ではGPSを活用することが考えられますが、橋の下など、GPSによる測位精度が低い環境においては、機体の速度推定の精度は相対的に悪化します。
今回、デンソーのUAVは、機体の速度推定の精度を上げるために、Qonceptの画像認識技術を用いた開発を進めています。具体的には、機体に搭載されたステレオカメラで橋の裏側などを撮影する場合、Qonceptの画像認識技術には、検出された特徴点の単位時間あたりの三次元的な移動量を計算することで機体の速度をリアルタイムに推定する技術が搭載されており、推定された速度をフィードバックすることで安定飛行による撮影に寄与します。
UAV(ドローン)は、小型・軽量であるという性質上、計算資源が限られております。そのため、機体に搭載されるソフトウェアにも、限られた計算資源でも適切に動作することが求められるところ、独自開発であることのメリットを活かしたプラットフォームニュートラルな最適化対応、リアルタイム画像処理についての豊富な経験といったQonceptの技術開発力や実績も評価されております。
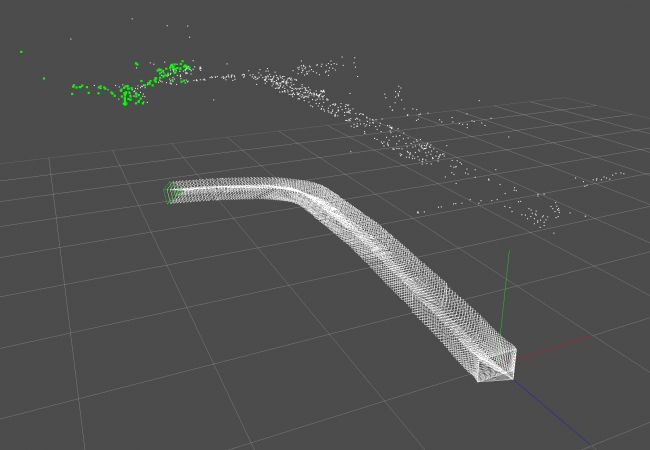 特徴点群の移動量から速度を推定
特徴点群の移動量から速度を推定
今後もQonceptでは、速度推定技術にとどまらず、画像認識技術による産業用UAV(ドローン)の安定飛行、操縦者の負荷軽減、撮影の最適化等に寄与する技術開発を進めてまいります。
なお、デンソーの産業用UAV(ドローン)は、2017年7月19日(水)から同月21日(金)までの間、東京ビッグサイト東ホールで開催される「第9回インフラ検査・維持管理展」のデンソーブース(ブース番号:1C-16)にてご覧いただけます。